الکتروموتور چیست ؟
موتور الکتریکی (electric motor) یک دستگاه الکترومکانیکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. بیشتر موتورهای الکتریکی برای تولید نیرو از تعامل بین میدانهای مغناطیسی (magnetic field) و جریان درون رساناها استفاده میکنند. فرآیند برعکس شامل تولید انرژی الکتریکی از انرژی مکانیکی میشود که به وسیله ژنراتور هایی مانند آلترناتورها (alternators) و دینامها (dynamo) انجام میشود. برخی از موتورهای الکتریکی را میتوان به عنوان ژنراتور (generator) مورد استفاده قرار داد. به عنوان مثال یک موتور کشنده (traction motor) یک وسیله نقلیه میتواند این دو وظیفه را انجام دهد. به موتورهای الکتریکی و ژنراتورها معمولا ماشینهای الکتریکی میگویند.
کاربرد الکتروموتورها
موتورهای الکتریکی در صنایع گوناگونی همچون فنهای صنعتی (industrial fans)، دمندهها (blowers)، ابزارهای برقی، وسایل خانگی، ابزارهای قدرت و دیسک درایوها مورد استفاده قرار میگیرند. موتورهای الکتریکی میتوانند به وسیله جریان مستقیم (direct current) تغذیه شوند مانند دستگاه پرتابل باتریخور و یا موتور وسایل نقلیه و یا به وسیله برق متناوب (alternating current) از شبکه توزیع برق (electrical distribution grid) و یا اینورتر (inverter). کوچکترین موتورها را میتوان در ساعتهای مچی الکتریکی یافت.
موتورهای عمومی دارای ابعاد و عملکرد استاندارد شدهای هستند که در مصارف صنعتی توان مکانیکی را فراهم میکنند. موتورهای الکتریکی بسیار بزرگ در پیشرانی کشتیها،کمپرسورهای خطوط لوله (pipeline compressors) و پمپهای آب موجود هستند و دارای اندازههای نامی تا 100 مگاوات میباشند. موتورهای الکتریکی را میتوان برحسب منبع تغذیه، ساختمان داخلی، کاربرد و یا نوع حرکتی که تولید میکنند دستهبندی کرد.

دستگاههایی مانند سولونید مغناطیسی و بلندگو که برق را به حرکت تبدیل میکنند اما قدرت مکانیکی قابل استفاده تولید نمیکنند، به ترتیب به عنوان اکچویتور (actuators) و ترنسدیوسر (transducers) خوانده میشوند. موتورهای الکتریکی برای تولید نیروی خطی یا گشتاور (چرخشی) استفاده میشوند.
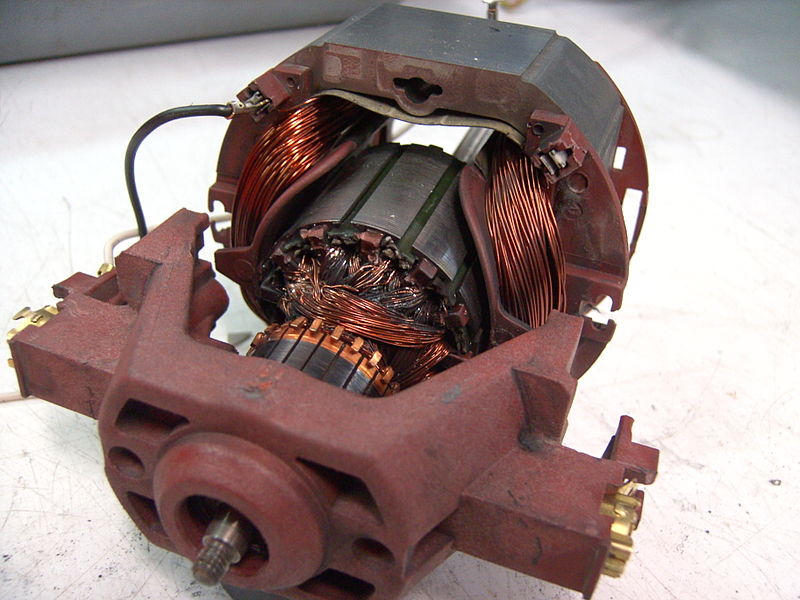
اجزاء موتور الکتریکی
اجزای یک موتور معمولی
- روتور
- استاتور
- فاصله هوایی
- سیم پیچ ها
- کموتاتور
روتور
در یک موتور الکتریکی، روتور (rotor) بخش در حال حرکت است که با چرخاندن شافت توان مکانیکی را تحویل میدهد. روتور معمولا دارای رساناهایی است که دارای جریان الکتریکی هستند و تحت تاثیر میدان مغناطیسی استاتور تولید نیروی لازم برای چرخش شافت را انجام میدهند. البته برخی از روتورها دارای آهنرباهای دایمی هستند و رسانای حامل جریان در استاتور قرار میگیرد.
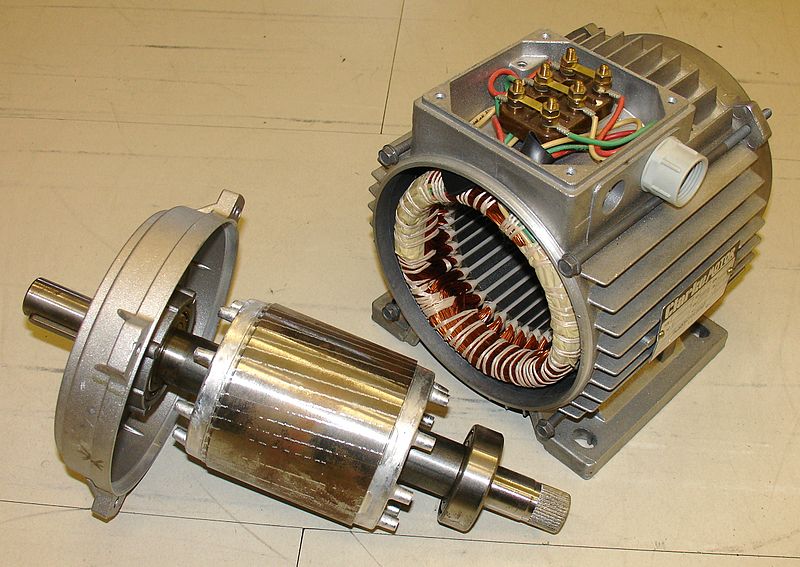
استاتور
بخش ثابت موتور استاتور (stator) است که معمولا دارای سیم پیچ یا آهنربای دایمی میباشد.
فاصله هوایی
در بین روتور و استاتور فاصله هوایی (air gap) وجود دارد. شکاف هوایی دارای تاثیر مهمی است و معمولا تا حد ممکن کوچک میباشد زیرا یک شکاف بزرگ اثر منفی زیادی بر عملکرد یک موتور الکتریکی میگذارد.
سیم پیچ
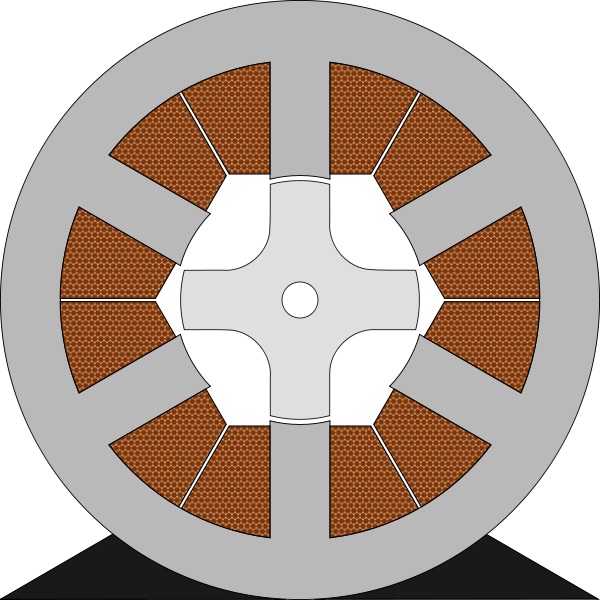
سیم پیچها (windings) سیمهایی هستند که به صورت کلاف بافته شدهاند و معمولا در اطراف یک هسته مغناطیسی (magnetic core) چند لایه از جنس آهن نرم پیچیده شدهاند؛ به طوری که زمانی که در اثر جریان الکتریکی انرژی میگیرند، تشکیل قطب مغناطیسی میدهند.
ماشینهای الکتریکی دارای دو نوع آرایش قطبهای میدان مغناطیسی هستند: ماشینهای قطب برجسته (salient-pole) و ماشینهای قطب غیر برجسته (nonsalient-pole). در ماشینهای قطب برجسته، میدان مغناطیسی قطب توسط پیچش سیمپیچ در اطراف قطب در زیر وجه قطب تولید میشود. در ماشین قطب غیر برجسته، یا ماشین با میدان توزیع شده (distributed field) و ماشین با روتور مدور، سیم پیچ در شیارهای وجه قطب توزیع شده است. موتور با قطب سایهدار (shaded-pole motor) دارای یک سیم پیچ در اطراف بخشی از قطب است که فاز میدان مغناطیسی را برای قطب به تاخیر میاندازد.
برخی موتورها دارای رساناهایی هستند که از فلز ضخیمتری مانند میله یا ورق فلزی از جنس مس و گاهی آلومینیوم تشکیل شدهاند و معمولا به وسیله القای الکترومغناطیسی حرکت میکنند.
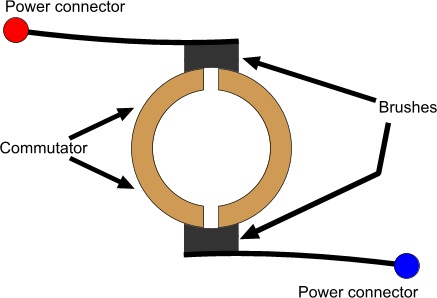
کموتاتور
کموتاتور (commutator) مکانیزمی است که برای تغییر ورودی ماشینهای AC و DC به کار میرود و شامل قطاعهای رینگهای لغزشی (slip ring) هستند که از یکدیگر و از شفت موتور الکتریکی عایق شدهاند. جریان آرمیچر (armature) موتور از طریق جاروبکهای (brushes) ثابت در تماس با کموتاتور دوار تامین میشود که باعث معکوس شدن جریان مورد نیاز و اعمال توان بهینه به ماشین در زمان چرخش روتور از یک قطب تا قطب دیگر میشود. در غیاب این معکوسسازی جریان، موتور تا توقف کامل ترمز میکند. در سایه پیشرفتهای قابل توجه چند دهه گذشته به دلیل بهبود تکنولوژی کنترلر الکترونیکی (electronic controller)، کنترل بدون سنسور (sensorless control)، موتور القایی (induction motor) و موتورهای با میدان آهنربای دایمی، موتورهای با کموتاسیون الکترومکانیکی (electromechanically commutated motors) به صورت گسترده در حال جایگزینی به وسیله موتورهای القایی با کموتاسیون خارجی (externally commutated induction motors) و موتورهای آهنربای دایمی (permanent magnet motors) هستند.
توجه چند دهه گذشته به دلیل بهبود تکنولوژی کنترلر الکترونیکی (electronic controller)، کنترل بدون سنسور (sensorless control)، موتور القایی (induction motor) و موتورهای با میدان آهنربای دایمی، موتورهای با کموتاسیون الکترومکانیکی (electromechanically commutated motors) به صورت گسترده در حال جایگزینی به وسیله موتورهای القایی با کموتاسیون خارجی (externally commutated induction motors) و موتورهای آهنربای دایمی (permanent magnet motors) هستند.
تغذیه موتور
همانطور که در بالا گفته شد، موتور DC معمولا از طریق کموتاتور رینگ لغزشی تغذیه میشود. کموتاسیون موتور AC میتواند به صورت کموتاتور رینگ لغزشی یا کموتاتور خارجی و یا از نوع کنترل سرعت ثابت (fixed-speed)، کنترل سرعت متغیر (variable-speed control) و میتواند از نوع سنکرون (synchronous) یا آسنکرون (asynchronous) باشد. موتورهای یونیورسال (universal motors) میتوانند به هر دو صورت AC یا DC کار کنند.
کنترل موتور
موتورهای AC با کنترل سرعت ثابت دارای استارترهای مستقیم آنلاین (direct-on-line) یا استارت نرم (soft-start) هستند.
موتورهای AC با کنترل سرعت متغیر دارای انواع مختلفی از تکنولوژیهای اینورتر توان (power inverter)، درایو فرکانس متغیر (variable-frequency drive) و یا کموتاتور الکترونیکی (electronic commutator) هستند.
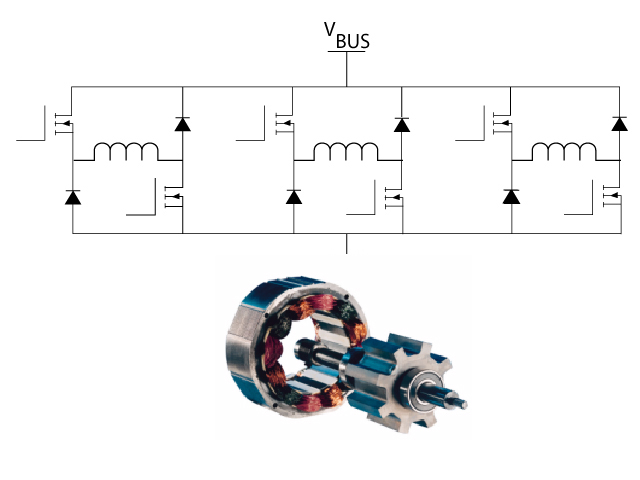
عبارت کموتاتور الکترونیکی معمولا مربوط به کاربردهای موتورهای DC بدون جاروبک (brushless DC motor) با کموتاسیون داخلی و موتورهای رلوکتانسی سویچی (switched reluctance motor) میشود.
انواع اصلی موتورها
موتورهای الکتریکی بر اساس سه اصل فیزیکی مختلف کار میکنند: مغناطیس (magnetic)، الکترو استاتیک (electrostatic) و پیزو الکتریک (piezoelectric). تاکنون متداولترین آنها، نوع مغناطیسی بوده است.
در موتورهای مغناطیسی (magnetic motors)، میدان مغناطیسی در روتور و استاتور تشکیل میشود. ضرب برداری این دو میدان یک نیرو و در نتیجه یک گشتاور بر روی محور موتور ایجاد میکند. یکی یا هر دو این میدانها را باید با چرخش روتور تغییر داد. این کار با روشن و خاموش کردن قطبها در زمان مناسب و یا تغییر قدرت قطب انجام میشود.
انواع اصلی موتورها شامل موتورهای DC و موتورهای AC میشود که نوع دوم تا حد زیادی جایگزین نوع اول شده است.
موتورهای الکتریکی AC میتوانند سنکرون (synchronous) یا آسنکرون (asynchronous) باشند.
زمانی که یک موتور سنکرون استارت میکند، نیاز به سنکرون شدن میدان مغناطیسی متغیر با همه گشتاورها میباشد.
در ماشینهای سنکرون میدان مغناطیسی باید با استفاده از وسیلهای غیر از القای اصلی همانند یک سیم پیچ با تحریک جداگانه و یا آهنرباهای دایمی تامین شود.
|
انواع کموتاسیون موتور |
||||
|
دستههای اصلی با کموتاسیون داخلی |
کموتاسیون خارجی |
|||
|
موتورهای با کموتاتور مکانیکی |
موتورهای با کموتاتور برقی(EC) |
ماشینهای آسنکرون |
ماشینهای سنکرون (2) |
|
|
AC |
AC(5)(6) |
AC(6) |
||
|
* موتور یونیورسال (موتور سری با کموتاتور AC یا موتورAC/DC)(1) * موتور دفعی (repulsion motor) |
موتور DC با تحریک الکتریکی: * تحریک جداگانه * سری * شانت * کامپاند
موتور جریان مستقیم PM |
با روتور PM: * موتور BLDC
با روتور فرومغناطیس: * SRM |
موتورهای سه فاز: * SCIM(3)(8) * WRIM(4)(7)(8)
موتورهایAC: * خازن * مقاومت * اسپلیت * قطب چاکدار |
موتورهای سه فاز: * WRSM * PMSM * BLAC motor * IPMSM * SPMSM * هایبرید
موتورهایAC:(10) * خازن دایمی اسپلیت * هیسترزیس * پلهای * SyRM * هایبریدSyRM-PM |
|
الکترونیک ساده |
یکسو ساز، ترانزیستور خطی و یا چاپر DC |
الکترونیک پیچیدهتر |
پیچیدهترین الکترونیک(VFD) در صورت امکان |
|
یادداشتها:
- چرخش مستقل از فرکانس ولتاژ AC است.
- چرخش با سرعت سنکرون (سرعت میدان استاتور موتور) برابر است.
- در سرعت ثابت SCIM، چرخش برابر است با سرعت لغزش (سرعت سنکرون منهای لغزش).
- در سیستمهای بازیافت انرژی معمولا از WRIM برای راهاندازی موتور استفاده میشود اما میتوان از آن برای تغییر سرعت استفاده کرد.
- کارکرد با سرعت متغیر.
- با این که درایوهای موتور القایی و سنکرون معمولا دارای خروجی شش مرحلهای یا موجی سینوسی هستند، درایوهای موتور BLDC معمولا دارای شکل موج جریان ذوزنقهای میباشند. البته رفتار هر دو ماشین سینوسیی و ذوزنقهای PM از نظر جنبههای اصلی خود یکسان است.
- در کارکرد با سرعت متغیر از WRIM در بازیافت انرژی لغزشی و در ماشین القایی با تغذیه دوگانه استفاده میشود.
- سیمپیچ قفسی (cage winding) به معنی روتورهای قفس سنجابی است و شامل سیمپیچهایی است که به صورت خارجی و از طریق رینگهای لغزشی به هم متصل میشوند.
- بیشتر تک فاز و گاهی سه فاز.
اختصارات:
BLAC: موتور AC بدون جاروبک (brushless AC)
BLDC: موتور DC بدون جاروبک (brushless DC)
BLDM: موتور DC بدون جاروبک (brushless DC motor)
EC: کموتاتور الکترونیکی (electronic commutator)
PM: آهنربای دایم (permanent magnet)
IPMSM: موتور سنکرون با آهنربای دایمی داخلی (interior permanent magnet synchronous motor)
PMSM: موتور سنکرون با آهنربای دایمی (permanent magnet synchronous motor)
SPMSM: موتور سنکرون با آهنربای دایمی سطحی (surface permanent magnet synchronous motor)
SCIM: موتور القایی قفس سنجابی (squirrel-cage induction motor)
SRM: موتور رلوکتانسی قطع و وصلی (switched reluctance motor)
SyRM: موتور رلوکتانسی سنکرون (synchronous reluctance motor)
VFD: درایو فرکانس متغیر (variable-frequency drive)
WRIM: موتور القایی با روتور سیمپیچی (wound-rotor induction motor)
WRSM: موتور سنکرون با روتور سیمپیچی (wound-rotor synchronous motor)
موتور با کموتاسیون داخلی
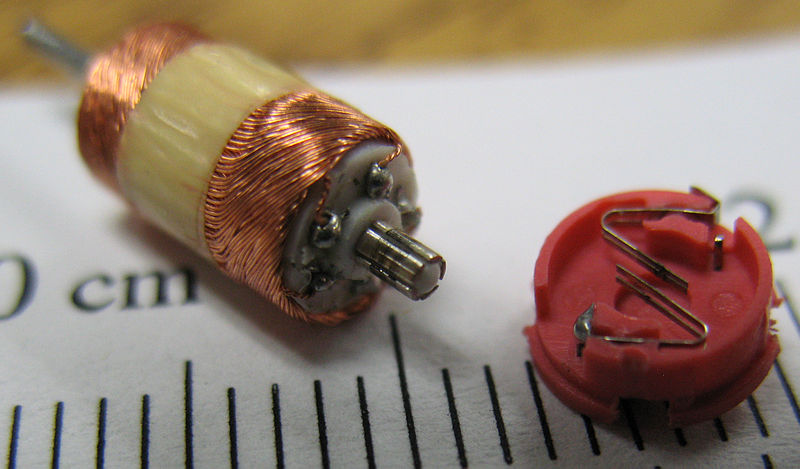
موتور DC جاروبکی
تمام موتورهای DC با کموتاسیون داخلی به وسیله برق DC کار میکنند. بیشتر موتورهای DC از نوع PM کوچک هستند. این موتورها دارای کموتاسیون مکانیکی برای برعکس کردن جریان سیم پیچ به صورت همزمان با چرخش هستند.
موتور DC با تحریک الکتریکی
موتور DC کموتاتوری دارای مجموعهای از سیم پیچهای دوار است که بر روی یک آرمیچر (armature) نصب شده بر روی یک شافت دوار پیچیده شدهاند. شافت کموتاتور را نیز حمل میکند که شامل یک سوییچ الکتریکی دوار بلند است که با چرخش شافت به صورت دورهای جریان سیم پیچ روتور را معکوس میکند. بنابراین، هر موتور DC جاروبکی دارای جریان AC درون سیمپیچهای دوار خود است. جریان از درون یک یا چند جاروبک که بر روی کموتاتور قرار دارند جریان مییابد. جاروبکها یک منبع خارجی برق را به آرمیچر دوار اتصال میدهند.
آرمیچر دوار شامل یک یا چند سیم پیچ در اطراف یک هسته فرو مغناطیسی لایهلایه که از نظر مغناطیسی نرم است، میباشد. جریان از جاروبکها به کموتاتور و یک سیم پیچ از آرمیچر جریان مییابد و آن را یک آهنربای موقت میکند. میدان مغناطیسی تولید شده توسط آرمیچر با یک میدان مغناطیسی ثابت تولید شده توسط آهنرباهای دایمی و یا یک سیم پیچ میدان دیگر که بخشی از قاب موتور هستند، تعامل میکند. نیروی بین دو میدان مغناطیسی تمایل به چرخاندن محور موتور دارد. با چرخش شافت موتور، کموتاتور برق را میان سیمپیچها قطع و وصل میکند، که باعث جلوگیری از همراستا شدن کامل قطب مغناطیسی روتور با قطب مغناطیسی میدان استاتور میشود و این باعث میشود که روتور هرگز متوقف نشود (بر خلاف سوزن قطبنما) و تا زمانی که برق تامین میشود به چرخش خود ادامه دهد.
بسیاری از محدودیتهای موتور DC کموتاتوری کلاسیک به دلیل نیاز به جاروبکهایی است که در مقابل کموتاتور فشار وارد میکنند. این کار باعث ایجاد اصطکاک میشود.زمانی که روتور از شکاف عایق بین بخشهای کموتاتور میگذرد، جاروبکها تولید جرقه میکنند که باعث قطع شدن مدارهای کویل میشود. بسته به نوع طراحی کموتاتور، این ممکن است شامل اتصال کوتاه شدن بخشهای مجاور به وسیله جاروبکها و در نتیجه انتهای کویلها در لحظهای باشد که از شکافها عبور میکنند.
علاوه بر این، اندوکتانس سیم پیچ روتور باعث میشود که ولتاژ هر مدار در زمانی که آن مدار باز میشود افزایش یابد که باعث افزایش جرقه جاروبکها میگردد. این جرقه باعث محدودتر شدن سرعت ماشین میشود زیرا جرقه بسیار سریع باعث گرم شدن بیش از حد، سایش و یا حتی ذوب شدن کموتاتور میگردد.
چگالی جریان در واحد سطح جاروبکها در ترکیب با مقاومت آنها باعث محدود شدن خروجی موتور میگردد. قطع و وصل تماسهای الکتریکی همچنین باعث تولید نویز الکتریکی میشود. جاروبکها در نهایت فرسوده میشوند و نیاز به جایگزینی دارند و خود کموتاتور در اثر فرسایش نیاز به تعمیرات (در موتورهای بزرگ) و یا تعویض (در موتورهای کوچک) دارد. تجهیز کموتاتور در موتورهای بزرگ، یک قطعه گران قیمت است که نیاز به مونتاژ دقیق بسیاری از قطعات دارد. در موتورهای کوچک کموتاتور معمولا به صورت دایمی با روتور یکپارچه شده است، بنابراین جایگزینی آن معمولا نیاز به جایگزین کردن کل روتور دارد.
در حالی که بیشتر کموتاتورها استوانهای هستند، برخی از آنها به صورت دیسکهای مسطح متشکل از چندین قسمت (به طور معمول، حداقل سه قسمت) میباشند که بر روی یک عایق نصب شدهاند.
جاروبکهای بزرگ برای سطح تماس بزرگتر جاروبک مطلوب هستند تا خروجی موتور را به حداکثر برسانند، اما جاروبکهای کوچک برای کاهش جرم و به حداکثر رساندن سرعتی که در آن موتور میتواند بدون برخورد بیش از حد جاروبکها و جرقه کار کند به کار روند. جاروبکهای کوچک برای کاهش هزینهها نیز مطلوب هستند. فنرهای سختتر نیز میتوانند برای استفاده از جاروبکها با جرم مشخص در سرعت بالاتر به کار روند اما این کار به قیمت تلفات اصطکاکی بیشتر و راندمان پایینتر و فرسایش سریعتر جاروبک و کموتاتور میباشد. بنابراین طراحی جاروبک موتور DC مستلزم ایجاد توازن بین توان خروجی، سرعت و کارایی/فرسایش میباشد.
ماشینهای DC به صورت زیر تعریف میشوند:
- مدار آرمیچر (armature circuit): سیمپیچی که در آن جریان بار حمل میشود، به طوری که میتواند بخش ثابت و یا دوار موتور یا ژنراتور باشد.
- مدار میدان (field circuit): مجموعهای از سیم پیچها که تولید یک میدان مغناطیسی میکنند، به طوری که در ماشینهای الکتریکی میتواند القای الکترومغناطیسی رخ بدهد.
- کموتاسیون (commutation): یک روش مکانیکی است که در آن میتوان یکسوسازی انجام داد و یا در ماشینهای DC، با برق DC حرکت ایجاد نمود.
پنج نوع موتور جاروبکی DC وجود دارد:
- موتور DC با سیم پیچ شنت (DC shunt-wound motor)
- موتور DC با سیم پیچ سری (DC series-wound motor)
- موتور DC کامپاند (DC compound motor) دارای دو آرایش:
– کامپاند تجمیعی (cumulative compound)
– کامپاند تفاضلی (differentially compounded)
- موتور PMDC
- موتور DC با تحریک جداگانه (separately excited)
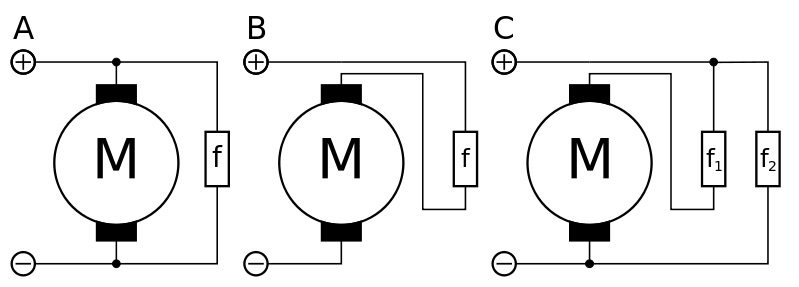
A: شانت، B: سری، C: کامپاند، f=سیمپیچ میدان
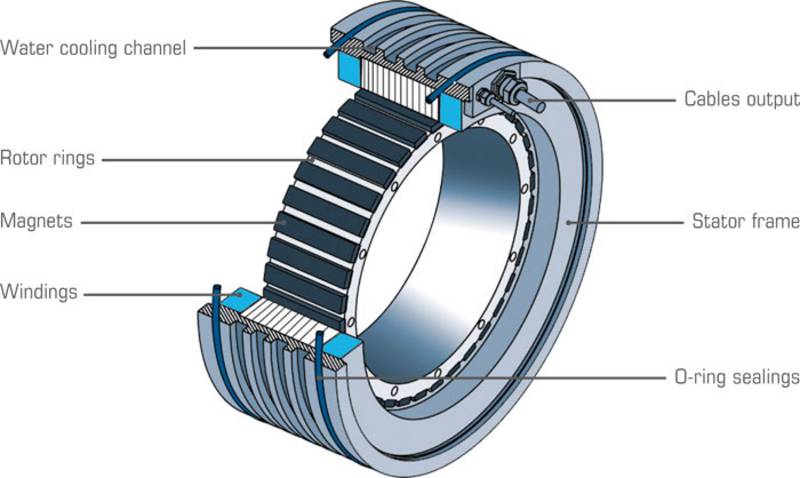
موتور DC آهنربای دایمی
موتور آهنربای دایمی (PM motor) دارای سیم پیچ میدان در قاب استاتور نیست، به جای آن برای تامین میدان مغناطیسی که میدان روتور با آن برای تولید گشتاور تعامل میکند، بر آهنربای دایم تکیه دارد. ممکن است به منظور بهبود کموتاسیون در شرایط تحت بار، در موتورهای بزرگ از سیمپیچهای جبرانساز به صورت سری با آرمیچر استفاده شود. از آنجا که این میدان ثابت است، نمیتوان آن را برای کنترل سرعت تنظیم کرد.
میدانهای PM استاتور برای موتورهای کوچک مناسب است؛ به این دلیل که مصرف برق سیمپیچهای میدان را حذف میکند. بیشتر موتورهای DC بزرگتر از نوع دینامی (dynamo) هستند که دارای سیمپیچهای استاتور میباشند. از لحاظ تاریخی، PMها توانایی حفظ شار بالا را در صورت اوراق کردن دستگاه نداشتند و سیم پیچهای میدان برای به دست آوردن مقدار شار مورد نیاز عملیتر بودند. از طرف دیگر PMهای بزرگ بسیار گران و همچنین خطرناک هستند و مونتاژ آنها دشوار است، این مسایل باعث سنگین شده کفه ترازو به سمت سیمپیچهای میدان برای ماشینهای بزرگ میشود.
برای به حداقل رساندن وزن کلی و اندازه، موتورهای کوچک PM از آهنرباهای پر انرژی از جنس نئودیمیوم یا دیگر عناصر استراتژیک استفاده میکنند که بیشتر آنها آلیاژهای نئودیمیوم – آهن – بور هستند. ماشینهای الکتریکی با PMهای پر انرژی با چگالی شار بیشتر خود، حداقل قابل رقابت با تمام ماشینهای الکتریکی سنکرون و القایی تک تغذیهای (singly fed) با طراحی بهینه هستند.
موتور DC بدون جاروبک
برخی از مشکلات موتور الکتریکی DC جاروبکی، در طراحی BLDC حذف شدهاند. در این موتور، سوییچ دوار (rotating switch) مکانیکی یا کموتاتور با یک سوییچ الکترونیکی خارجی که با موقعیت روتور سنکرون میشود، جایگزین شده است. موتورهای BLDC معمولا دارای راندمان 85 تا 90 درصد و یا بیشتر هستند. راندمان تا 96.5 درصد نیز برای یک موتور BLDC گزارش شده است، در حالی که موتورهای DC جاروبکی به طور معمول دارای راندمان 75 تا 80 درصد میباشند.
موتورهای BLDC معمولا در جایی استفاده میشوند که در آن کنترل دقیق سرعت لازم است؛ همانند هارد دیسک کامپیوتر یا درایوهای CD و مکانیزمهای درون محصولات اداری مانند فنها، پرینترهای لیزری و فتوکپی. موتورهای DC بدون جاروبک مزایای زیادی نسبت به موتورهای معمولی دارند:
- در مقایسه با فنهای AC دارای موتور قطب چاکدار (shaded-pole motors) بسیار کارآمد هستند و بسیار خنکتر از موتورهای AC کار میکنند. این کارکرد خنک منجر به بهبود بسیاری در عمر بیرینگهای فن میشود.
- بدون داشتن کموتاتوری که بخواهد فرسوده شود، عمر یک موتور BLDC میتواند بسیار طولانیتر از یک موتور DC جاروبکی و دارای کموتاتور باشد. کموتاسیون میتواند منجر به میزان زیادی نویز الکتریکی و رادیویی شود؛ بدون کموتاتور و یا جاروبک، موتور BLDC میتواند در دستگاههای حساس الکتریکی مانند تجهیزات صوتی و یا کامپیوتر استفاده شود.
- سنسورهای اثر هال (Hall effect sensors) کوچکی که که کموتاسیون ایجاد میکنند میتوانند یک سیگنال سرعت سنج مناسب را برای استفاده در کنترل حلقه بسته (closed-loop control) همانند سروو کنترل (servo-controlled) فراهم کنند. در فنها، سیگنال سرعتسنج را میتوان برای استخراج یک سیگنال برای کارکرد فن و همچنین ایجاد بازخورد از سرعت حرکت استفاده کرد.
- موتور به راحتی میتواند با یک ساعت داخلی یا خارجی سنکرون شود که منجر به کنترل سرعت دقیق میشود.
- در موتورهای BLDC، بر خلاف موتورهای جاروبکی هیچ شانسی برای جرقه وجود ندارد که این باعث مناسب شدن آنها در محیطهای دارای مواد شیمیایی فرار و سوخت میشود. همچنین جرقه باعث تولید اوزن میشود که میتواند در ساختمانهای با تهویه ضعیف جمع شود و به سلامت ساکنان آسیب رساند.
- موتورهای BLDC معمولا در تجهیزات کوچکی مانند کامپیوتر و همچنین در فنها برای رهایی از گرمای ناخواسته استفاده میشوند.
- موتورهای BLDC از نظر آکوستیکی بسیار آرام هستند که مزیت زیادی در تجهیزاتی است که تحت تاثیر ارتعاشات قرار دارند.
موتورهای BLDC مدرن دارای بازه توانی از کمتر از یک وات تا چند کیلووات هستند. موتورهای BLDC بزرگتر تا حدود 100 کیلووات در وسایل نقلیه برقی به کار میروند. همچنین این موتورها استفاده قابل توجهی در هواپیماهای برقی مدل دارند.
موتور رلوکتانسی سوییچی
موتور رلوکتانسی قطع و وصلی (switched reluctance motor) یا SRM، هیچ جاروبک یا آهنربای دایمی ندارد و روتور آن دارای جریان الکتریکی نیست. به جای آن در اثر ناهمراستایی اندک بین قطب روی روتور با قطب استاتور گشتاور ایجاد میشود. روتور خود را با میدان مغناطیسی استاتور همراستا می کند در حالی که سیمپیچهای میدان استاتور به صورت نوبتی انرژیدار میشوند که باعث چرخش میدان استاتور میگردد.
شار مغناطیسی ایجاد شده توسط سیمپیچهای میدان مسیر کمترین رلوکتانس مغناطیسی را دنبال میکند؛ به این معنی که شار از قطبهایی از روتور میگذرد که به قطب انرژیدار استاتور نزدیکتر هستند، در نتیجه آن قطبهای روتور را مغناطیسی و ایجاد گشتاور میکنند. زمانی که روتور میچرخد، سیمپیچهای مختلف دارای انرژی و باعث نگهداری چرخش روتور میشوند.
در حال حاضر SRMها در لوازم خانگی استفاده میشوند.
موتور یونیورسال AC-DC
موتور با کموتاسیون و سیمپیچ سری به عنوان موتور یونیورسال (universal motor) شناخته میشود زیرا توانایی کار با هر دو برق AC یا DC را دارد. موتور یونیورسال میتواند به خوبی با برق AC کار کند چرا که جریان میدان و آرمیچر و در نتیجه میدان مغناطیسی حاصل به صورت سنکرون و با پلاریته معکوس تغییر میکند و از این رو نیروی مکانیکی حاصل شده باعث یک جهت ثابت چرخش میشود.
موتورهای یونیورسال با کارکرد در فرکانسهای عادی خطوط برق اغلب در محدوده کمتر از 1000 وات یافت میشوند. موتورهای یونیورسال همچنین موتورهای کشش معمول را در راه آهن برقی تشکیل میدهند. در این کاربرد، استفاده از برق AC برای موتوری که برای DC طراحی شده است باعث تلفات راندمانی به دلیل گرمایش ناشی از جریانهای گردابی اجزای مغناطیسی آنها میشود؛ مخصوصا برای تکههای قطبهای میدان موتور که برای DC از آهن تکهای (غیر لایه ای) استفاده میکند؛ که در حال حاضر به ندرت استفاده میشوند.
مزیت موتور یونیورسال این است که تغذیه AC میتواند در موتورهایی به کار رود که برخی از ویژگیهای معمول موتورهای DC را دارند، مخصوصا گشتاور راهاندازی بالا و طراحی بسیار جمع و جور در سرعتهای بالا. جنبه منفی موتورهای یونیورسال مشکلات مربوط به تعمیر و نگهداری و عمر کوتاه کموتاتور است. این موتورها در دستگاههایی مانند میکسر مواد غذایی و ابزارآلات قدرت که به طور مقطعی استفاده میشوند و اغلب نیاز به گشتاور استارت بالا دارند، استفاده میشود. چندین تپ در سیم پیچ میدان قرار داده شدهاند که میتوانند کنترل غیر دقیق سرعت را انجام دهند.
مخلوطکنهای خانگی چند سرعته اغلب یک کویل میدان را با چند تپ و یک دیود که به صورت سری با موتور قرار دارد و باعث کارکرد موتور در نیم موج یکسو شده AC میشود، به کار میبرند. موتورهای یونیورسال همچنین خود را مدیون کنترل سرعت الکترونیکی (electronic speed control) میدانند که آنها را تبدیل به یک انتخاب ایدهآل برای دستگاههایی مانند ماشین لباسشویی خانگی میکند.
در حالی که SCIMS نمیتواند یک شافت را سریعتر از فرکانس خطوط برق بچرخاند، موتورهای یونیورسال میتوانند در سرعتهای بسیار بالاتر کار کنند. این باعث میشود که موتورهای یونیورسال برای لوازم خانگی از قبیل مخلوطکن، جاروبرقی، سشوار مفید میشوند که در آنها سرعت بالا و وزن سبک مطلوب است. موتورهای یونیورسال همچنین در ابزارهای قابل حمل مانند دریل، اره برقی استفاده میشوند. بسیاری از موتورهای جارو برقی و دستگاههای چمن زنی بیش از 10 هزار دور در دقیقه سرعت دارند در حالی که بسیاری از خردکنهای کوچک مشابه بیش از 30 هزار دور در دقیقه سرعت دارند.
ماشین AC با کموتاسیون خارجی
طراحی موتورهای القایی و سنکرون AC برای کار با برق تک فاز و چند فاز سینوسی و یا شبه سینوسی (همانند برق موجی شکل برای کاربردهای سرعت ثابت با برق AC شبکه و یا کاربرد سرعت متغیر برای کنترلرهای VFD) بهینه شده است. موتور AC دارای دو بخش است: استاتور ثابت دارای کویلهای مناسب برای برق AC برای تولید میدان مغناطیسی دوار و یک روتور متصل به شافت خروجی که به وسیله میدان دوار تولید گشتاور میکند.
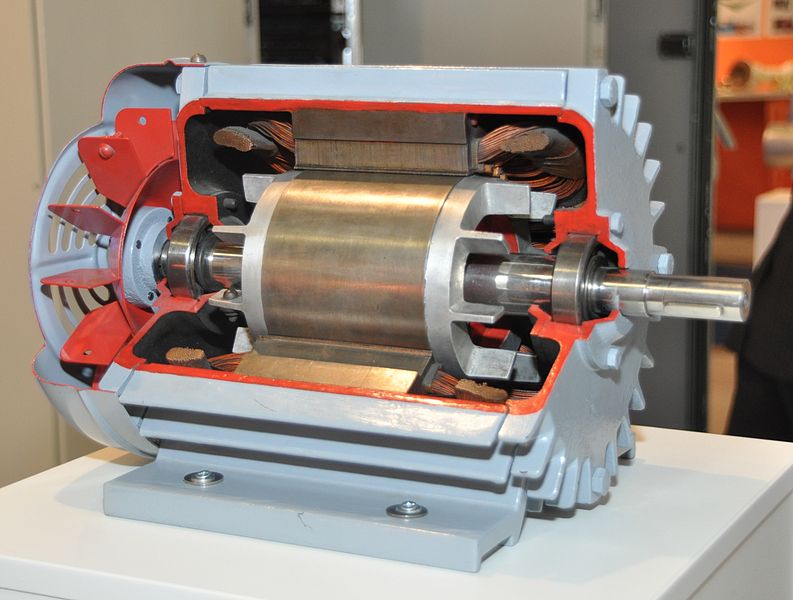
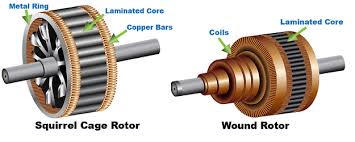
موتور القایی با روتور قفسی و سیمپیچی (cage and wound rotor induction motor)
یک موتور القایی، یک موتور آسنکرون AC است که در آن توان به وسیله القای الکترومغناطیسی به روتور منتقل میشود که بسیار شبیه به کارکرد ترانسفورماتور (transformer) است. یک موتور القایی شبیه به یک ترانسفورماتور دوار است که در آن استاتور (بخش ثابت) در اصل سمت اولیه ترانسفورماتور و روتور (بخش دوار) سمت ثانویه آن است. موتورهای القایی چند فاز به طور گسترده در صنعت استفاده میشوند.
موتورهای القایی را میتوان به SCIMها و WRIMها تقسیم بیشتر کرد. SCIMها دارای یک سیمپیچ سنگین از میلههای جامد از جنس آلومینیوم یا مس ساخته و به وسیله رینگهایی در انتهای روتور به هم متصل میشوند. زمانی که میلهها و حلقهها با هم در نظر گرفته میشوند، بسیار شبیه به یک قفس تمرین حیوان میشوند و نام آنها از اینجا میآید.
جریانهای القا شده در این سیمپیچ، میدان مغناطیسی روتور را فراهم میکنند. شکل میلههای روتور تعیین کننده مشخصات سرعت – گشتاور است. در سرعتهای پایین، جریان القایی در قفس سنجابی به صورت تقریبی دارای فرکانس خط است و تمایل دارد که در قسمتهای خارجی قفس روتور قرار گیرد. زمانی که موتور شتاب میگیرد، فرکانس لغزش کمتر میشود و جریان بیشتری در داخل سیمپیچ برقرار میشود. با شکل دادن به میلهها برای تغییر مقاومت بخشهای سیمپیچ در بخشهای داخلی و خارجی قفس، به طور موثر یک مقاومت متغیر وارد مدار روتور میشود. با این حال بیشتر این موتورها دارای میله یکنواخت هستند.
در یک WRIM، سیمپیچهای روتور از دورهای زیادی از سیم عایق ساخته شدهاند و به رینگهای لغزشی (slip rings) روی شافت موتور متصل هستند. میتوان یک مقاومت خارجی و یا دیگر دستگاههای کنترلی را به مدار روتور متصل نمود. مقاومتها امکان کنترل سرعت موتور را فراهم میکنند، هر چند که توان زیادی در مقاومت خارجی بین میرود. یک مبدل میتواند از مدار روتور تغذیه شود و توان فرکانس لغزش را که در غیر این صورت تلف میشود، به وسیله یک اینورتر (inverter) یا موتور – ژنراتور جداگانه به سیستم قدرت باز میگردد.
WRIM در درجه اول برای استارت یک بار اینرسی بالا و یا باری که نیاز به یک گشتاور شروع بسیار بالا دارد، در سراسر محدوده سرعت کامل مورد استفاده قرار میگیرد. با انتخاب درست مقاومتهای مورد استفاده در مقاومت ثانویه و یا رینگ لغزشی، موتور قادر به تولید گشتاور ماکزیمم در جریان تامینی نسبتا کم از سرعت صفر تا سرعت کامل میباشد. این نوع از موتور همچنین یک سرعت قابل کنترل تامین میکند.
سرعت موتور را میتوان تغییر داد، زیرا منحنی گشتاور موتور به طور موثری با تغییر مقاومت متصل به مدار روتور تغییر میکند. افزایش میزان مقاومت باعث حرکت سرعت مربوط به ماکزیمم گشتاور به سمت پایین میشود. اگر مقاومت متصل به روتور فراتر از نقطهای رود که ماکزیمم گشتاور در سرعت صفر رخ میدهد، گشتاور کاهش بیشتری مییابد.
هنگامی که موتور با باری استفاده میشود که دارای یک منحنی گشتاور است که با سرعت را افزایش مییابد، موتور در سرعتی کار میکند که در آن گشتاور موتور با گشتاور بار برابر شود. کاهش بار باعث میشود که سرعت موتور بالا رود و افزایش بار باعث میشود که سرعت موتور کاهش یابد تا زمانی که گشتاور بار و موتور برابر شود. کارکرد با این روش باعث میشود که تلفات لغزش که میتواند بسیار قابل توجه باشد، در مقاومت ثانویه از بین برود. تنظیم سرعت و راندمان خالص نیز بسیار ضعیف است.
موتور گشتاوری
موتور گشتاوری (torque motor) نوع خاصی از موتور الکتریکی است که در حالت قفل شده (جلوی حرکت روتور گرفته شده است) میتواند به طور نامحدود کار کند، بدون این که متحمل آسیب شود. در این حالت کاری، موتور یک گشتاور ثابت را به بار وارد میکند که نام این موتور نیز از همین گرفته شده است. یک کاربرد معمول موتورهای گشتاوری، موتورهای چرخش نوارهای کاست میباشد. در این کاربرد، موتور دارای این ویژگی است که همواره یک کشش ملایم ثابت به نوار اعمال میکند. این موتورها با دریافت ولتاژ بالاتر میتوانند نوار را سریع به جلو یا عقب حرکت بدهند، بدون این که نیازی به مکانیزمهای اضافی مانند چرخدنده یا کلاچ داشته باشند.
یکی دیگر از کاربردهای رایج موتورهای گشتاوری، کنترل دریچه گاز یک موتور احتراق داخلی به کمک یک گاورنر الکترونیکی است. در این کاربرد، موتور در برابر یک فنر بازگشتی کار میکند و دریچه گاز را مطابق با خروجی گاورنر حرکت میدهد.
موتور سنکرون
موتور الکتریکی سنکرون (synchronous electric motor) یک موتور AC است که وجه برجسته آن روتوری است که به وسیله سیمپیچهای آهنربایی با سرعت برابر با فرکانس AC و در نتیجه میدان مغناطیسی ناشی از آن میچرخد. یکی دیگر از راههای بیان آن، این است که موتور سنکرون در شرایط کارکرد خود بدون لغزش کار میکند. این بر خلاف یک موتور القایی (induction motor) است که باید برای تولید گشتاور لغزش داشته باشد. یک نوع از موتور سنکرون مانند یک موتور القایی است؛ به جز این که روتور توسط یک میدان DC تحریک میشود. رینگهای لغزشی (slip rings) و جاروبکها (brushes) برای هدایت جریان به روتور به کار میروند. قطبهای روتور به یکدیگر متصل میشوند و با سرعت برابر میچرخند؛ به همین دلیل به آن نام موتور سنکرون دادهاند.

موتورهای سنکرون هیسترزیس (hysteresis synchronous motors) موتورهای دو فاز با خازن جابهجایی فاز برای یک فاز هستند. این موتورهای همانند موتورهای القایی راهاندازی میشوند، روتور که یک سیلندر صاف است به طور موقت مغناطیسی میشود. قطبهای توزیع شده آن، کارکرد موتورهای سنکرون هیسترزیس را مانند یک PMSM میکند. جنس روتور همانند یک میخ معمولی به صورتی است که مغناطیسی باقی میماند ولی میتواند به راحتی غیر مغناطیسی شود.
استانداردهای موتور
استانداردهای اصلی ساخت و طراحی موتورها به شرح زیر هستند:
International Electrotechnical Commission: IEC 60034 Rotating Electrical Machines
National Electrical Manufacturers Association: MG-1 Motors and Generators
Underwriters Laboratories: UL 1004 – Standard for Electric Motors
منبع : مکانیزم